In control research, the final goal of modeling a physical system is operating it to obtain a desired functionality. More precisely, designer wants to command the system in a way that it will generate a desired output. And the question is:
What can be the control algorithm which will generate the required command to make the system produce the desired output?
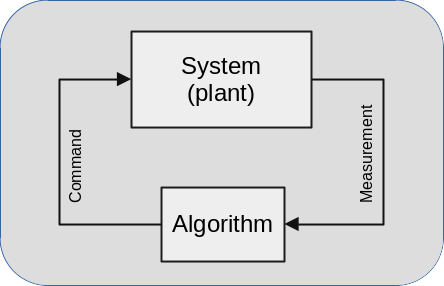
It is a very common practice to design a control algorithm which is a function of the values measured by the sensors placed on the system.
Desired functionality or output can be formulated in countless many ways which depends on the nature of the considered problem. Designer may want
- to use minimum perturbation energy to steer the system
- the system to track a target with the minimum possible error
- to accomplish a task in a minimum amount of time
- to achieve the control objective even there is too much electrical noise effecting the sensors
- to use the cheapest and simplest possible electronic/mechanic components in the implementation
- to satisfy very low measurement and communication bandwith requirements
- etc.
or any weighted combination of such requirements.
Simple control algorithm
The control algorithm can be designed freely as long as it makes the system yield the desired functionality. One can place a graphics processing unit (GPU) which runs a deep neural network between the measurement and command lines. Or, a simple voltage divider built with two resistors can be enough for the objective.
Stateful (with memory) algorithm requires memory components which keeps information from the previous measurements. The command (\(u_T\)) at time \(T\) is a function of the measurements (\(y_t\)) from \(t=0\) to \(t=T\).
$$u_T = k(y_T, y_{T-1}, \dots)$$
Stateless (without memory) algorithm requires the measurement (\(y_T\)) at time \(T\) to calculate the command (\(u_T\)).
$$u_T = k(y_T)$$
The stateless algorithms are simpler, cheaper and easier to implement. However, finding a stateless solution is not possible for all control problems. In such cases, the algorithm designer can simplify the solution by keeping as few as possible state information. Additionally, selection of measurement points and the points where the command is applied have an important effect on the simplification of control algorithm. This raises a prior question:
What is the best way to actuate the system and what are the most important properties to measure?
Sensor/Actuator placement
A real-life physical system does not expose its all internal state to be measured. For example, crystal oscillators used in electronic circuits are modeled by two state variables but one of them can be measured from its terminals which is enough to generate oscillatory behavior. Even if a physical system model's all state are measurable, mounting sensors to all of them can be very costly and impractical.
The same logic holds for actuators. As an example, it is not practical to attach separate motors to all rotating parts in a mechanical device but you can distribute the motion of one motor by using gears and shafts.
Hence, deciding the way to actuate and measure is an important step before designing the controller. A careful consideration of this step paves the way to create simpler control algorithms.